近日,国际顶级学术期刊《自然》(Nature)刊发了西湖大学工学院赵世钰教授团队的研究成果:他们开发的“飞行工具箱”(FlyingToolbox)空中协同操作系统,在全球首次实现多架旋翼无人机在飞行过程中自主交换工具,成功攻克了近距离飞行与高精度操作不可兼得的世界级技术难题。
想象一下:两架无人机以“叠罗汉”的方式悬停空中,上方无人机伸出机械臂,精准抓取下方无人机携带的工具,完成任务后物归原主——整个过程如同一位主刀医生从护士手中接过手术器械般流畅自然。这一充满未来感的协同作业场景,已在西湖大学工学院赵世钰实验室成为现实。
近日,国际顶级学术期刊《自然》(Nature)刊发了西湖大学工学院赵世钰教授团队的研究成果:他们开发的“飞行工具箱”(FlyingToolbox)空中协同操作系统,在全球首次实现多架旋翼无人机在飞行过程中自主交换工具,成功攻克了近距离飞行与高精度操作不可兼得的世界级技术难题。
“飞行工具箱”系统由工具箱无人机与操作无人机组成
当前,无人机大多扮演着“飞行摄像机”的角色,主要从事航拍、监测等被动观察类任务。而空中作业机器人则更进一步,它将多旋翼无人机与高自由度机械臂结合,成为“飞行的操作手”,可代替人类在危险或难以抵达的环境执行任务,例如危险物品抓取、高空建筑清洁、接触式检修甚至空中增材制造。
然而,单个空中机器人载荷有限,难以独立完成复杂任务。赵世钰团队从外科手术中获得灵感:能否让多架无人机像手术团队那样协作?一名“护士”无人机携带多种工具,另一架“医生”无人机专注操作,按需取用工具。
实现该构想需采用“叠飞”形态——即一架无人机飞到另一架上方进行工具交换。但一旦双机垂直距离缩小至0.6米,就会产生速度高达13.18米/秒的下洗气流,相当于6级强风,极易导致无人机失控相撞。
面对强风干扰下厘米级精度的对接要求,研究团队提出了三项创新核心技术:
柔性电磁对接机构——智能吸附接口提升容错能力。该设计在机械臂末端设置带铁片的空腔,工具顶部则设有四个环形柔顺圆锥电磁对接装置,利用电磁吸附实现精准对接。其柔顺结构可在姿态略有偏差时仍保证对接成功。
柔性电磁对接机构工作原理
气流扰动估计与补偿方法——下方无人机内置气流速度场模型,结合空气动力学原理与实时传感数据,通过神经网络预测并补偿上方无人机产生的气流干扰。
高精度对接与操作控制技术——通过视觉识别与动态调整实现精准控制。操作无人机通过摄像头识别工具平台上的二维码定位,下方无人机则实时调整六个旋翼转速,抵抗气流干扰,确保位置误差小于1.5厘米。
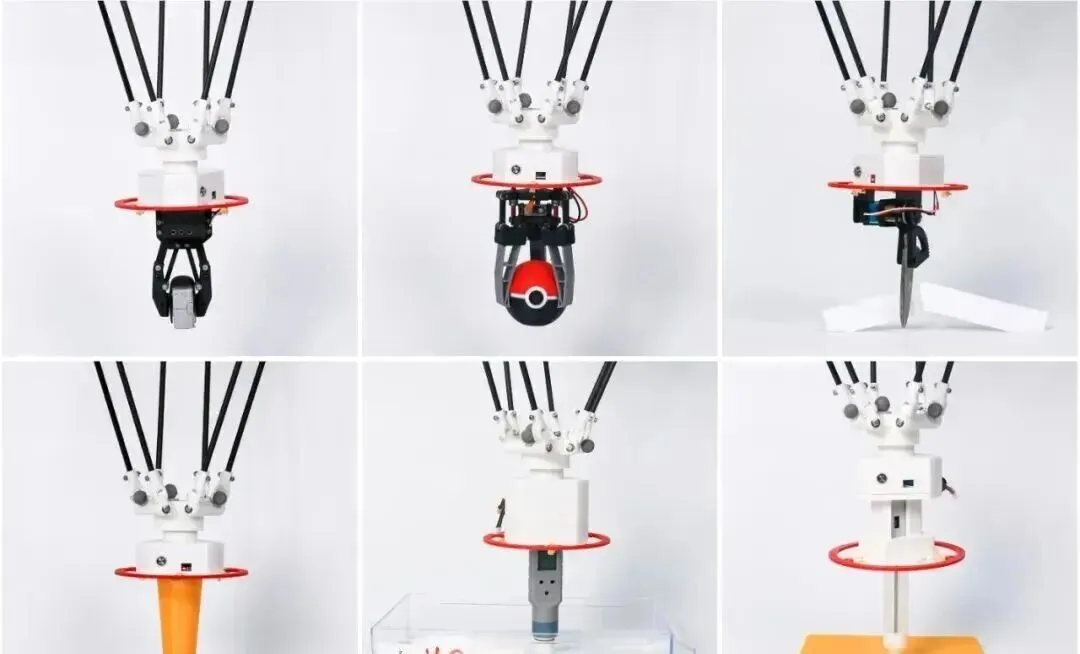
实验显示,该系统已成功完成不少于20次连续对接,并实现了“双机协作”和更复杂的“三机协作”任务场景。
赵世钰教授表示:“这项技术将为空中作业机器人开拓全新应用前景,未来可用于空中换电池、物资补给等复杂任务,在高层建筑维护、灾难救援等领域具有巨大潜力。”